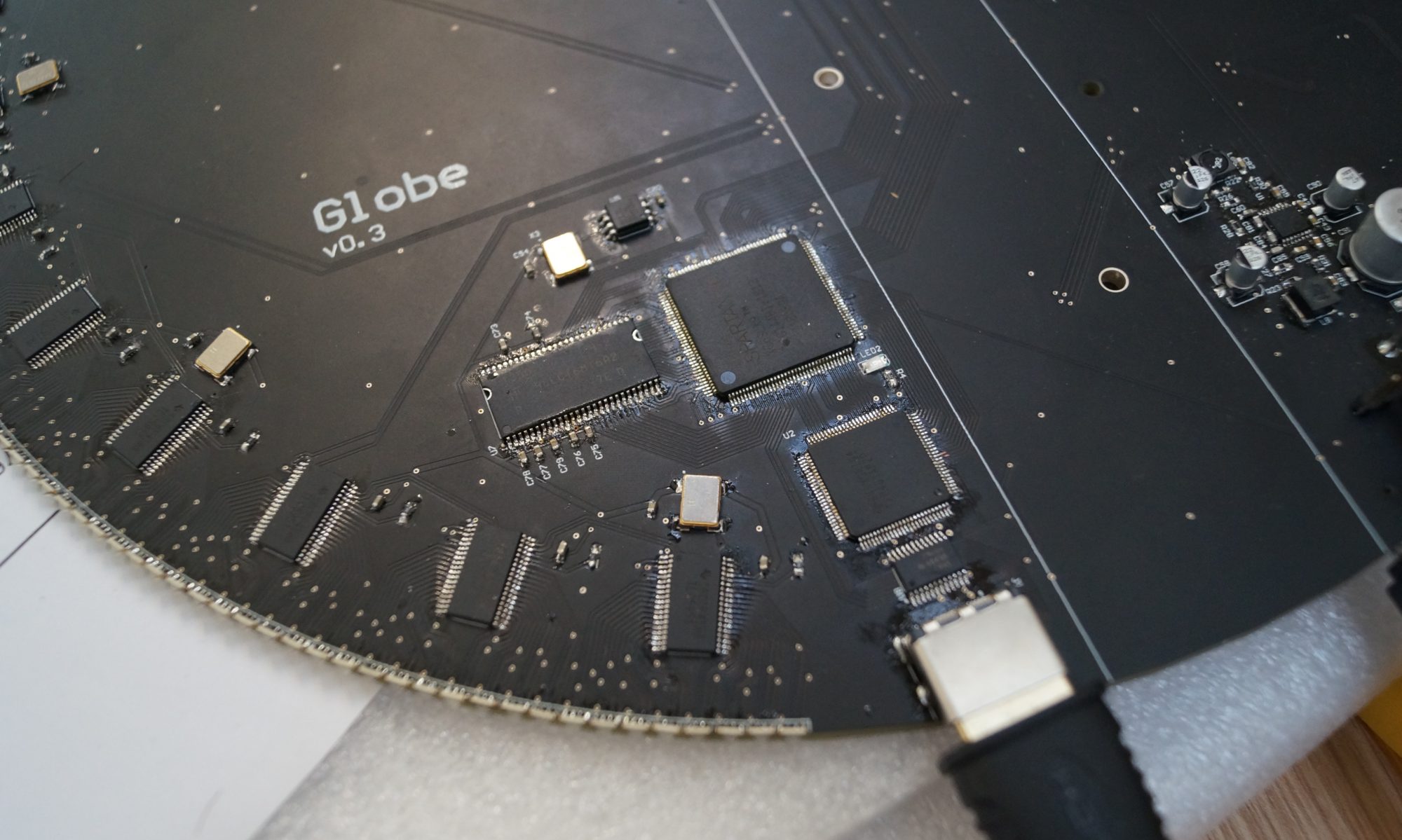
So this is just a mini update on what’s been going on over the last few weeks. The PCB soldering and testing is coming along nicely – so far I have tested the new voltage regulators which are working fine, the Molex Edgemate connector, and the Raspberry Pi SODIMM socket.
The next stage is to test the WIFI module, which once working will allow me to remotely access my Pi while it’s plugged into the PCB so that I can start testing other capabilities. This has slowed me down a little, as I need to dig out a WIFI dongle which will then allow me to install the ESP8266 drivers, which will then allow me to transfer the Pi from the IO board to Globe and do things with it there. It’s not a major issue, it’s just a bit of a pain in the arse to keep switching monitor and keyboard etc cables around (I’m not money on a whole new monitor and keyboard, mouse and so on for the few hours the compute module will actually be in the IO board). I’ll carve out a day to fiddle with all of that later this week…
I have pretty much finalised the design for the new mechanical housing, and will be putting an order in the the shaft this week too. The new shaft is much shorter and has a much smaller diameter than the old one so will be far lighter and cheaper to manufacture. The new box section for the frame has arrived, so I just need to drill the holes and insert the rivnuts and that will then be good to put together. I will be placing the order for the top and bottom steel plates (which will be dropping from 3mm to 1mm thickness mild steel) later this week too.
One design change I have decided to include in the next prototype PCB is to switch from passing ~24A at 5V up the slip rings, which just required a small amount of regulation down to the voltages needed for most of the components, to ~5A at 24V. The advantage of this is that it allows me to switch from slip rings with 6 rings rated at 10A each, to just 2 rings, significantly reducing the price.
The downside of this is that I have to do some fairly hefty regulation now on the PCB, requiring a 24V to 5V step-down converter which can handle the required current for all the LEDs. This isn’t a hugely complex affair and I will complete the next PCB design over the next couple of weeks (including any changes that will be flagged as I prototype this current PCB too). The only thing I need to watch out for is that this new hefty regulator doesn’t produce too much EMF (shielded inductors should go a long way to preventing this), lest approaching Globe causes some poor buggers pacemaker to stop working.
I finally got the previous Globe prototype out of storage – I say this a lot, bu that thing is really heavy. This allowed me to answer a very important question before proceeding any further with soldering the new prototype PCB; will the damn thing fly apart considering I significantly reduced PCB thickness AND put big old slots in it, and the answer is no – everything is fine. This means I can continue to design around the latest PCBs board outline without any major concern.
That pretty much sums up what has been going on lately, hopefully I will have some good news early next week that I have the ESP8266 module working and that, fingers crossed, I have the Pi programming the Spartan 6.