So depending on how the Kickstarter campaign is going/has gone this blog may be more or less redundant, but I am writing it on the assumption that the campaign has reached its target and the project is going ahead (after all one needs a solid project plan before asking people to provide funding). As an electronic …
17: Gearing up for Kickstarter
As of writing this the prototype is nearing completion and I am gearing up for Kickstarter. It’s been a difficult project to plan, partially due to Globe being a fairly complex project (as far as Kickstarters go) and also because there’s still a fair bit of development to be done. As with most things, it …
16: Mechanical housing

The mechanical housing has been kept as rugged and straight forward as possible; a simple frame 425mm wide, 400mm high made out of inch square mild steel to be nice and sturdy and leave plenty of room for fitting things in. The top, front and side panels are laser cut out of 6mm oak veneered …
15: Cables – to DIY or splice?
The sliprings I bought for this project have 4 power lines (10A each) and 14 data lines. HDMI cables consist of 4 shielded differential pair signal traces (3 data, 1 clock), I2C (clk and data), 5V, GND, CEC, hotplug detect and in some cases ethernet, along with a bunch of shielding. Of these I am …
14: Working code!

After a lot of head scratching and a fair amount of tweaking the code has finally been beaten into a working form. Because the hardware isn’t yet finished I have to capture the image by moving a camera with a long shutter speed across the board. The captured waveforms below show that the read/write cycle …
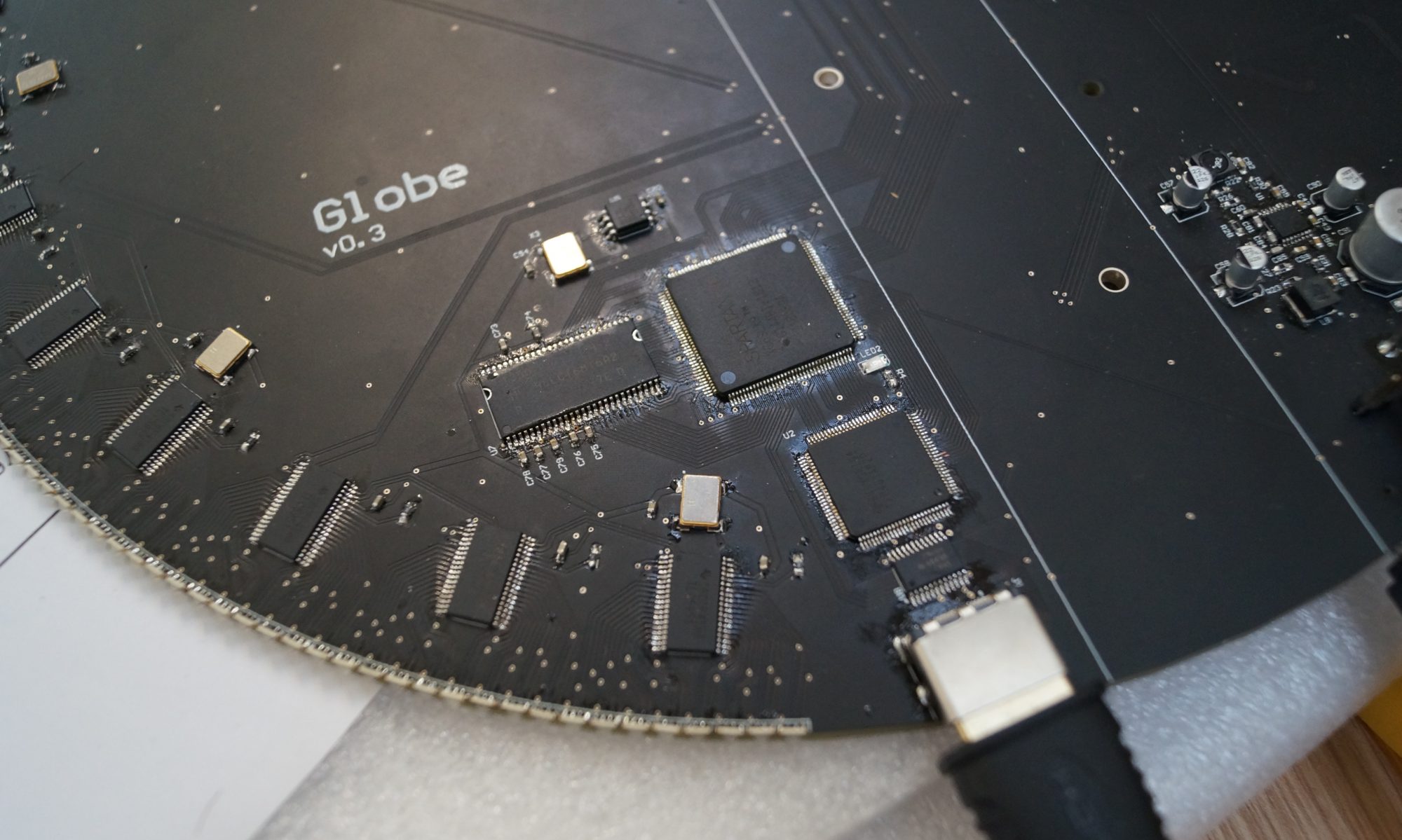
12: Globe PCB v2 soldered and ready for testing

After roughly two full days soldering I am finally finished and ready for testing. There will inevitably be some dry joints/bridges on the LEDs because they are really fiddly to solder. I still need to clean the flux residue off along with my grubby fingerprints but I shall do that as the last thing before …
Continue reading “12: Globe PCB v2 soldered and ready for testing”
11: Globe PCB v2 arrives

The new boards are in, looking even nicer in matt than they did in gloss and ready for soldering. All those silly little mistakes from v1 have been taken care of so this should go smoothly.
10: Motor madness

After all the motor related issues of the first project I decided something pretty beefy was needed. If at ~480rpm my poor little DC motor was using about 180W, depending on the amount of power being lost as heat, it is fair to say that we will need about double that to be certain of reaching the …
9: Shiny new sliprings

These slip rings from MOFLON should mean that I never have to suffer the problems that the completely under-specced ones that I used back in the first display caused. Rated for 1500rpm with 4 power and 14 data lines these will allow the transfer of 5V up to 20A, HDMI and USB data and a tachometer pulse. Depending …
8: Safety first
The MKI used polycarbonate and aluminium for its case. Polycarbonate is well known for being bloody tough and easily worked, perfect for when you have no idea whether things are going to be flying off at you and you need to throw something together quickly and cheaply. The downside is that it tends to pick up and …